On July 1, 2024, the "2024 (4th) Low-speed Driverless Scene Ecological Co-construction and Development Conference" with the theme of "Zhilian Star City, New Quality Enabling" was held in Changsha. The conference was directed by the Changsha Municipal People's Government and hosted by the Hunan Xiangjiang New Area Management Committee. Changsha Bureau of Industry and Information Technology, Changsha Bureau of Industry and Information Technology, Hunan Xiangjiang New Area Science and Technology Innovation and Industry Promotion Association, Low-speed Driverless Industry Alliance, Changsha Intelligent Network United Automobile Industry Chain Promotion Office, Changsha Manufacturing Development Promotion Center, Hunan Xiangjiang Intelligent Science and Technology Innovation Center Co., Ltd., Changsha City. Jointly sponsored by Hunan Newenchi New Energy Vehicle Co., Ltd., Shenzhen New Strategic Media Co., Ltd. and New Strategic Low-Speed Driverless Industry Research Institute, and co-sponsored by China Automobile Institute Intelligent Network United Automobile Testing Center (Hunan) Co., Ltd. and Xiangjiang Foundation Town, it has fully linked up various government departments at all levels, alliances and core enterprises in the industrial chain.

As an annual industry feast, the influence and appeal of this conference are unprecedented. More than 500 participants, including leading scholars, experts and academicians from the intelligent network industry, high-level enterprises and industry elites from the low-speed driverless industry, as well as high-quality parts suppliers, terminal scene users and mainstream media reporters, attended the conference. Li Keqiang, academician of the Chinese Academy of Engineering, professor of Tsinghua University, chief scientist of the National Intelligent Network United Automobile Innovation Center, and Wang Yaonan, academician of the Chinese Academy of Engineering, expert in robotics and intelligent control, and professor of Hunan University, attended and delivered keynote speeches. Tan Yong, Deputy Secretary of Changsha Municipal Committee, Secretary of the Party and Labor Committee of Hunan Xiangjiang New Area (Changsha High-tech Zone) and Secretary of Yuelu District Committee, attended and delivered a speech. Vice Mayor Peng Tao and New District Leader Shuai Jun participated.


The conference set up a special round table forum for industry focus, inviting a number of executives and industry experts to discuss the new direction of driverless technology upgrading and market expansion.
Guests invited to the roundtable forum of the conference include: Zhang Bin, Chairman-in-Office of the Low-Speed Driverless Industry Alliance & Doctor Professor & Chief Engineer of the Institute of Advanced Studies of Northwest University of Technology, Zhao Jun, Vice President of Changsha Automotive Innovation Research Institute, Yu Mingkun, Founder & Chairman of Poseidon Robot, Yang Heng, Vice General Manager & Co-founder of Newenchi, Wei Yicai, Vice General Manager of Xiantu Intelligence, Dr. Fang Xiaoyong, Deputy Director of Yingfeng Environmental Intelligent Technology Center, Liu Kai, General Manager of Xiangjiang Intelligent Vehicle, and Zhou Kunming, General Manager of Nanoradar Science and Technology, will focus on the exchange and discussion of a series of topics on "rapid upgrade of intelligent enabling unmanned vehicles; exploration of scene ecology and global layout", and offer suggestions and suggestions.

In the round-table discussion, Zhou Kunming, general manager of Nanoradar Science and Technology, deeply analyzed the current situation and future of the low-speed driverless industry with the guidance of "rapid upgrade of intelligent enabling driverless vehicles, exploration of scene ecology and global layout". In view of the rapid upgrade of embodied intelligent enabling unmanned vehicles, he put forward unique opinions for the rapid upgrade of low-speed unmanned vehicles from four aspects, including embodied intelligent decision-making system enabling, perception system enabling, hardware system and software system, regulation and safety system.
In view of the exploration of the global layout of the scene ecosystem, he put forward three suggestions, first, product stability, quality clearance, export products must be mature and stable products, second, product compliance, products should meet the requirements of local regulations and norms, third, localization, focusing on the selection of local partners.
It is worth mentioning that Zhou Kunming elaborated on the important role of millimeter wave radar technology in the application of low-speed unmanned vehicles. As a key component supplier of millimeter wave radar in the low-speed unmanned vehicle industry chain, Nanoradar Technology plays an important role in the low-speed unmanned vehicle industry chain. With all-weather operation, high-precision detection and anti-jamming capability, Nanoradar millimeter wave radar provides a powerful environmental perception capability for low-speed unmanned vehicles, helping vehicles to achieve safer and more intelligent driving.
Looking forward to the future, Zhou Kunming calls on colleagues in the industry to work hand in hand, strengthen cooperation, jointly respond to the challenges of globalization with the attitude of "going to sea in a group", build an open, collaborative and win-win industrial ecology, and jointly promote the sustainable and healthy development of the low-speed unmanned vehicle industry.


Nanoradar in the field of low-speed vehicles
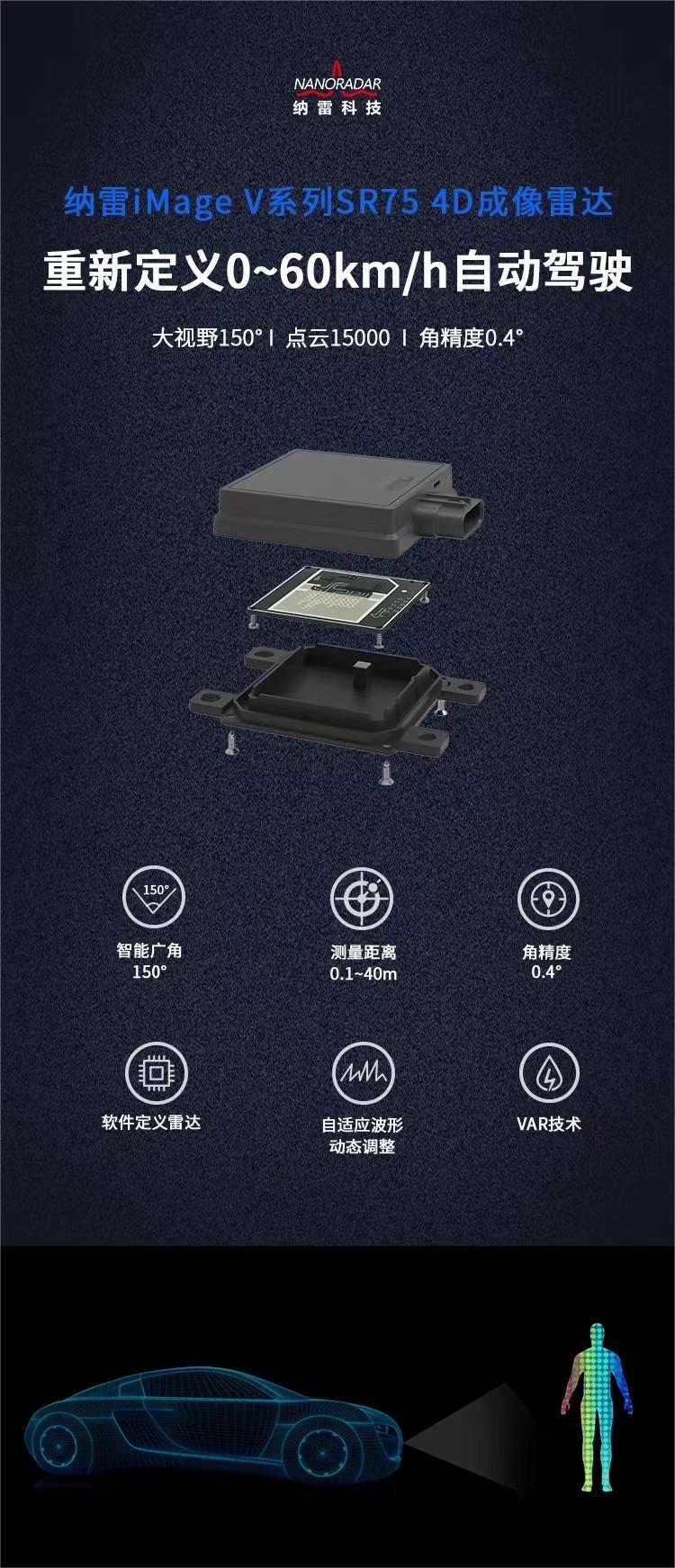
Nanoradar Technology has been deeply engaged in the field of low-speed vehicle millimeter wave radar system for many years, positioning L3-L5 high-level automatic driving, launching a full range of low-speed vehicle radar products for enabling automatic driving, covering various specifications of 20 m, 40 m and 170 m, and the maximum output of 4D imaging radar is 1500 point clouds per frame. The target number is 5.8 times that of the same kind of friends, and now the sales volume of products has reached more than 100,000 units, which are exported to 15 + countries around the world, mainly applied to more than 30 different types of low-speed vehicles, such as engineering vehicles, sanitation vehicles, forklifts, shuttle trucks, etc.