
In order to better support developers to use radar altimeter, NanoRadar technology has developed a set of radar firmware protocol for open source flight control ArduPilot. Without changing the source code of flight control ArduPilot, we can quickly use our NRA15 and NRA24 millimeter wave radar altimeter with a few simple steps of ArduPilot parameter setting.
From this way, it can shorten more than 30% time for product evaluation and performance test, it will be greatly improve the efficiency of new product development.

Start from the very beginning, only three steps:
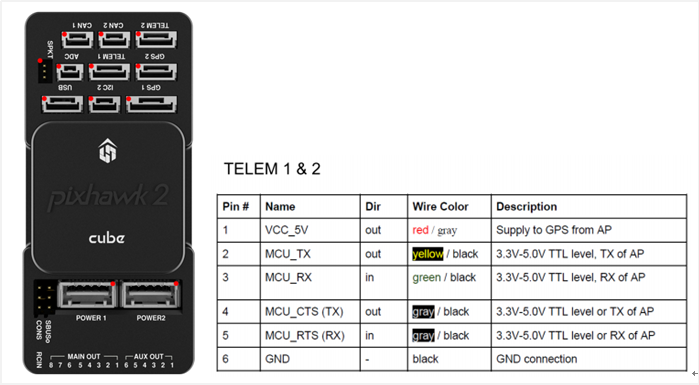
Step 1: Connect radar with flight control interface (example as the interface of Pixhawk hardware platform TELEM2);
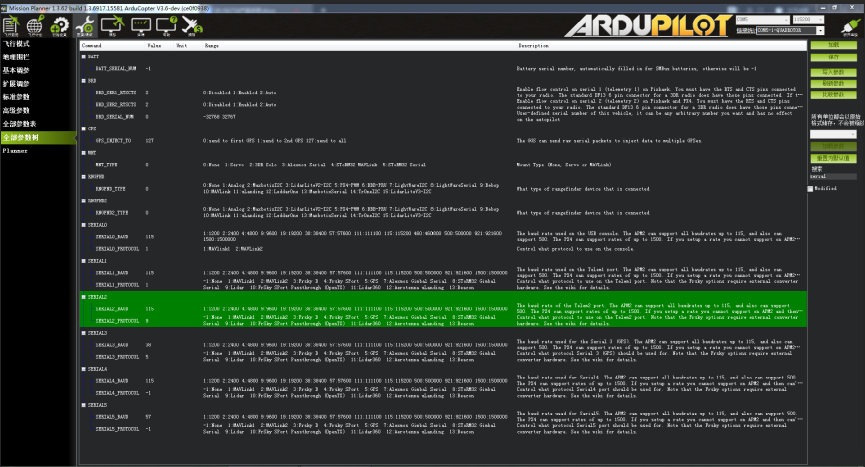
Step 2: Set the serial port parameter of TELEM2;
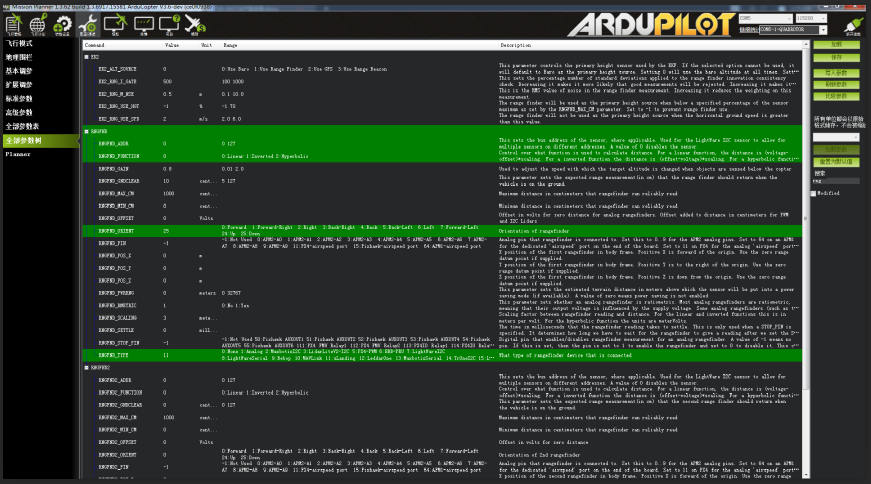
Step 3: Set the radar library parameter;
Save and restart flight control after completing the above Settings (please contact the sales for specific parameter settings), and then outdoor test can be conducted.
Supported hardware platform:
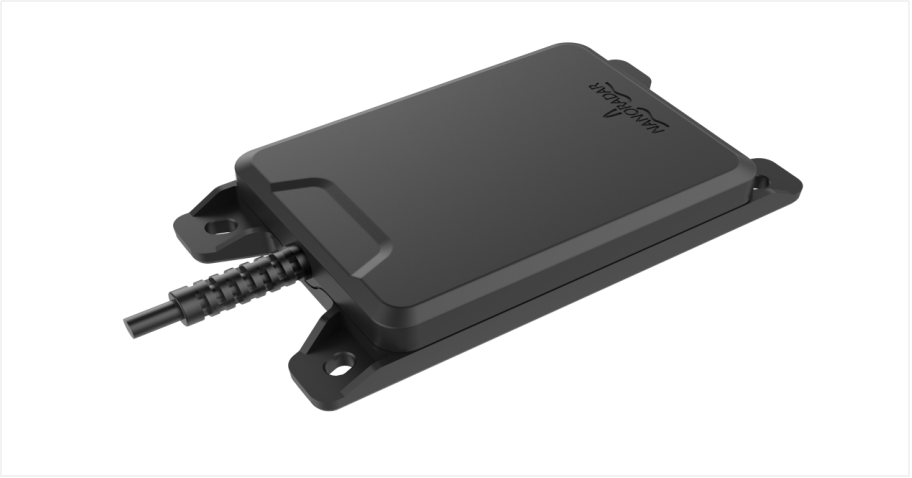
NRA15 Radar Introduction:
NRA15 is a compact K-band radar altimeter specially for UAVs precise navigation. It adopts 24GHz-ISM-Band, with the advantages of 4cm measuring accuracy, MAX detection range 100 meters, small size, high sensitivity, light weight, easy integration and stable performance, which satisfies the application requirements in unmanned aerial vehicle (UAV), helicopters, small airships and other field.
About the firmware platform of open source flight control Pixhawk:

Pixhawk is an advanced autopilot designed by the PX4 open hardware project and built by 3D robots. It features advanced processor and sensor technology from ST, as well as NuttX real-time operating system, enabling incredible performance, flexibility and reliability to control any autonomous aircraft. Pixhawk's flagship module will come with new peripherals, including digital airspeed sensor, external multi-color LED indicator support, and external magnetometer.All peripherals are automatically detected and configured.
The website address of open source flight control software Ardupilot: https://github.com/ArduPilot/ardupilot

